Getting Started¶
This guide runs through the basic functionality of the library, including installation of a Python package, using modules for building neural networks, and debugging the training results.
![]()
The library is distributed through PyPI, therefore you can use pip to install the library and all it’s depdendcies.
Please, be aware that for Linux operating system, PyPI contains PyTorch wheels built with CUDA, while Torch Geopooling is CPU-only library. Therefore consider using a proper installation path for your operating system according to the PyTorch get-started guide.
[1]:
!pip install torch-geopooling torch shapely matplotlib -qqq
[2]:
import torch
from shapely import Polygon
Regular Pooling¶
The package provides two types of pooling operations: regular and adaptive. Both internally build a quadtree for coordinates lookup. The major difference is that regular module create regular tiling of quads for the given polygon, while adaptive module learns the tiling during training.
In the example below, we create a regular pooling module and forward randomly-generated input coordinates.
The regular pooling requies a polygon as a parameter, which represents a boundary for input coordinates. The polygon should always be within of the exterior - a boundary for the quadtree. Input coordinates of the module should be within a polygon, otherwise module will raise an exception.
[6]:
from torch_geopooling.nn import QuadPool2d
poly = Polygon([(0.0, 0.0), (10.0, 0.0), (10.0, 10.0), (0.0, 10.0)])
exterior = (-100.0, -100.0, 200.0, 200.0)
regular_pool = QuadPool2d(4, poly, exterior, max_depth=11)
For each input coordinate module returns an associated weight tensor of (N, H) - size, where N is a batch size, and H equals to the number of features within each vector.
[8]:
regular_input = torch.DoubleTensor(1024, 2).normal_(5.0, 1.0)
output = regular_pool(regular_input)
output.size()
[8]:
torch.Size([1024, 4])
Adaptive Pooling¶
Adaptive pooling, unlike regular pooling, learns the quadtree structure, therefore there is no need to provide a polygon for tiling. In the example below, we create an adaptive pooling module and forward randomly-generated input coordinates.
[9]:
from torch_geopooling.nn import AdaptiveQuadPool2d
exterior = (-100.0, -100.0, 200.0, 200.0)
adaptive_pool = AdaptiveQuadPool2d(4, exterior=exterior, capacity=10, max_depth=11)
[10]:
adaptive_input = torch.DoubleTensor(1024, 2).normal_(5.0, 1.0)
output = adaptive_pool(adaptive_input)
output.size()
[10]:
torch.Size([1024, 4])
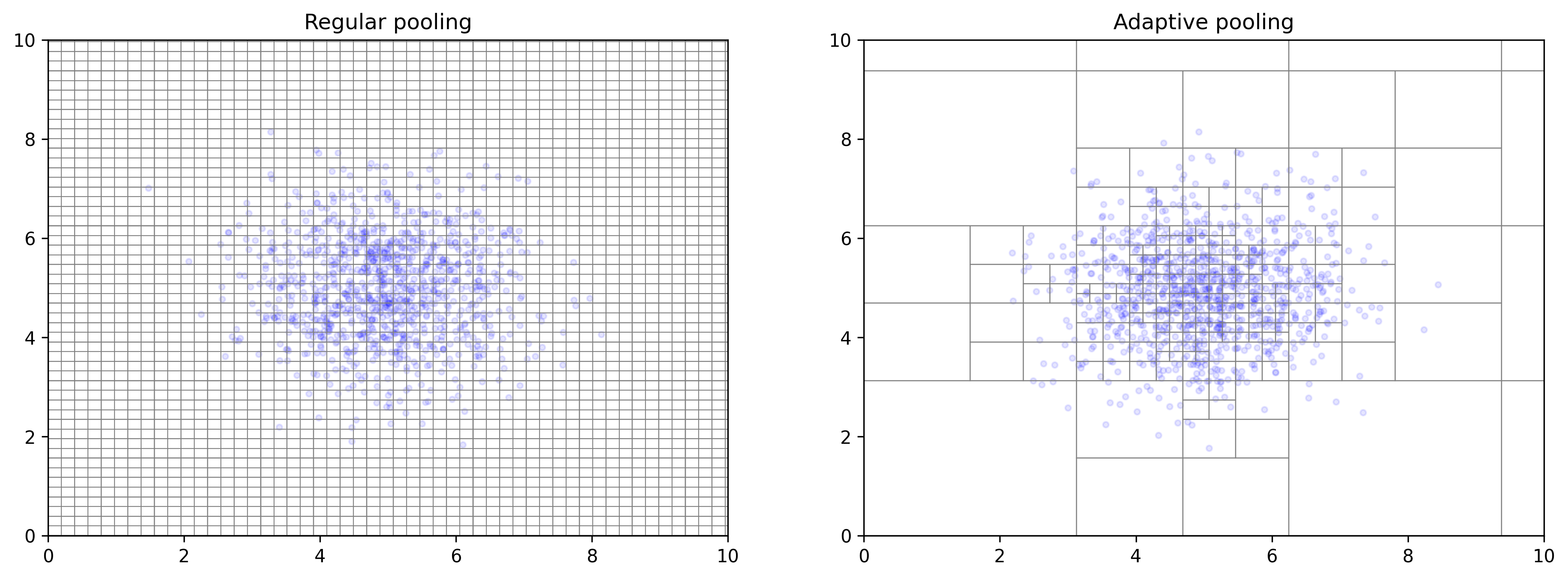
Debugging¶
All modules provide a list of nodes of the learned quadtree in a form of tiles, those tiles could be easily visualized using torch_geopooling.transforms module.
In the example below, we draw internal tiles of regular and adaptive quad-pooling operations.
[35]:
from matplotlib import pyplot as plot
from shapely import from_wkt
from torch_geopooling.transforms import TileWKT
fig, (ax0, ax1) = plot.subplots(ncols=2)
fig.set_dpi(300)
fig.set_size_inches(15, 5)
tile_wkt = TileWKT(exterior=regular_pool.exterior, internal=True)
for tile in tile_wkt(regular_pool.tiles):
poly = from_wkt(tile)
ax0.plot(*poly.exterior.xy, lw=0.5, color="gray", alpha=0.8)
tile_wkt = TileWKT(exterior=adaptive_pool.exterior, internal=False)
for tile in tile_wkt(adaptive_pool.tiles):
poly = from_wkt(tile)
ax1.plot(*poly.exterior.xy, lw=0.5, color="gray", alpha=0.8)
ax0.scatter(regular_input[:, 0], regular_input[:, 1], s=10, color="blue", alpha=0.1)
ax1.scatter(adaptive_input[:, 0], adaptive_input[:, 1], s=10, color="blue", alpha=0.1)
ax0.set_xlim(0, 10)
ax0.set_ylim(0, 10)
ax1.set_xlim(0, 10)
ax1.set_ylim(0, 10)
ax0.set_title("Regular pooling")
ax1.set_title("Adaptive pooling")
None